貝爾曼-福特演算法
就此誕生。貝爾曼-福特演算法會對 $V$ 個節點做 $V - 1$ 次鬆弛操作,重複鬆弛所有邊,進而持續改善、找尋最短路徑。")
封面圖片由 ChatGPT 生成。
前言
為了解決戴克斯特拉演算法中無法計算路徑為負權重的,貝爾曼-福特演算法(Bellman-Ford Algorithm)就此誕生。貝爾曼-福特演算法會對 $V$ 個節點做 $V - 1$ 次鬆弛操作,重複鬆弛所有邊,進而持續改善、找尋最短路徑。
名詞解釋
什麼是鬆弛
鬆弛(Relaxation)就是嘗試使用某一條邊,更新一個節點目前已知的最短距離,如果這條邊可以讓距離變得更短,就更新它。
什麼是負權迴圈
假設現在可以由幾個節點構成一個圈,此圈的總權重為負。則在進行貝爾曼-福特演算法時會無限繞圈,讓距離變得越來越小,甚至趨近負無限,造成無法定義最短路徑。
為什麼是 $|V|-1$ 鬆弛
$V$ 代表圖(Graph)中的頂點(Vertices)數量,無論從任一頂點到另一個頂點,最多只會經過 $|V|-1$ 條邊($E$ , Edges)。因此,如果第 $|V|$ 輪如果還能進行鬆弛操作,一定是陷入重複繞圈,表示存在負權迴圈。
運作原理
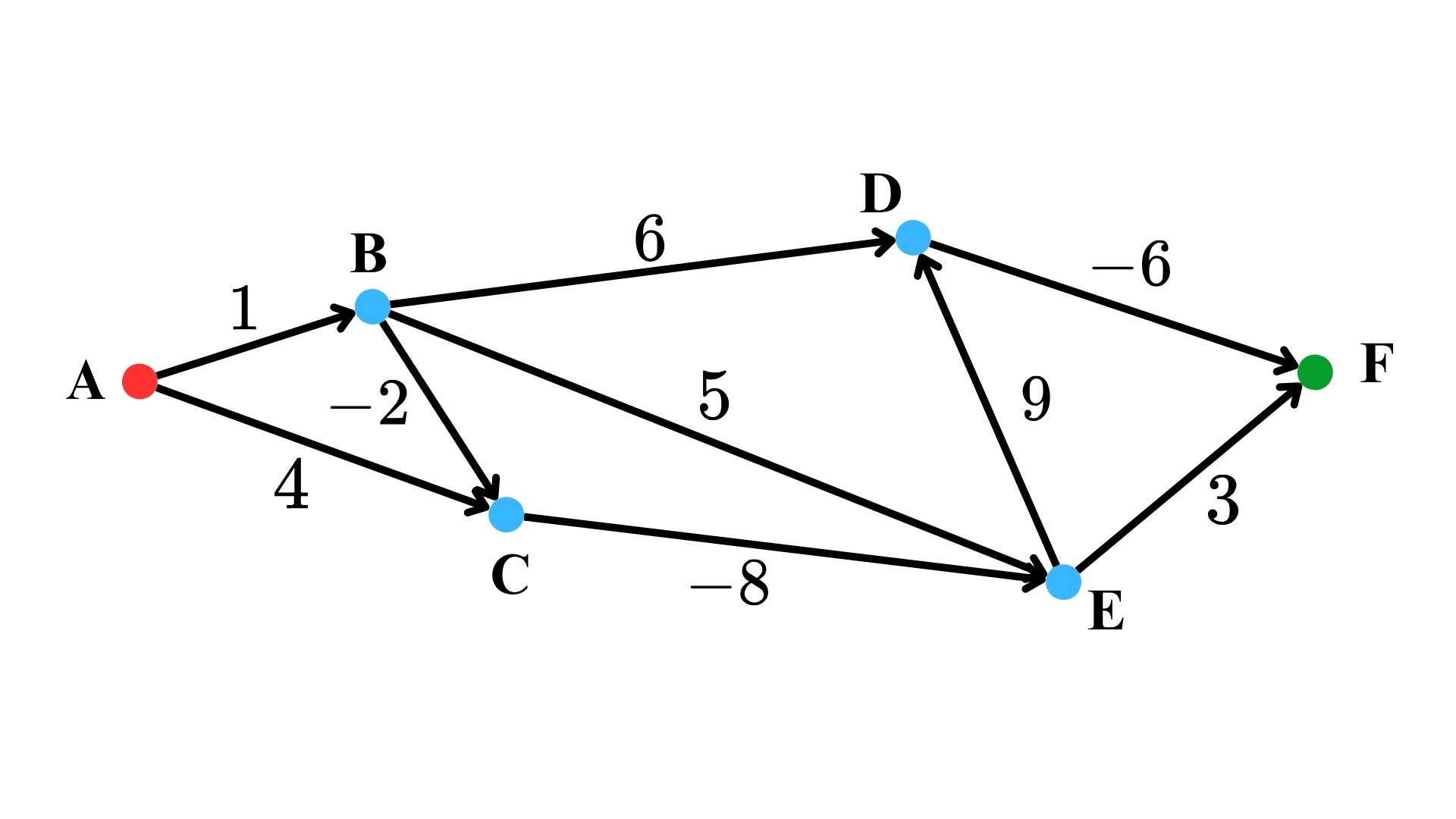
為了找到從 $A$ 點出發到達 $F$ 點的路徑,以下建立表格用於記錄路徑尋找過程中的前一個地點,所有距離的初始值皆為 $\infty$ 。因為總共有 6 個點,因此總共會進行 $|V| - 1 = 6 - 1 = 5$ 輪鬆弛。每一輪都需遍歷每條邊,用於更新每個節點的最短距離。
| 地點 | 距離 | 前一個地點 |
|---|---|---|
| A | $\infty$ | |
| B | $\infty$ | |
| C | $\infty$ | |
| D | $\infty$ | |
| E | $\infty$ | |
| F | $\infty$ |
因為出發點為 $A$ ,因此從 $A$ 開始計算,將 $A$ 點距離標記為 0 。
| 地點 | 距離 | 前一個地點 |
|---|---|---|
| A | 0 | |
| B | $\infty$ | |
| C | $\infty$ | |
| D | $\infty$ | |
| E | $\infty$ | |
| F | $\infty$ |
第一輪鬆弛
計算 $A$ 的鄰近點 $B$ 和 $C$ ,因為 $\overline{AB} = 1$ 和 $\overline{AC} = 4$ ,從原點距離計算 $0+1=1$ 、 $0+4=4$ ,都比現在表格中的距離 $\infty$ 還小,因此更新 $B$ 和 $C$ 的距離,並標記前一個地點為 $A$ 。
| 地點 | 距離 | 前一個地點 |
|---|---|---|
| A | 0 | |
| B | 1 | A |
| C | 4 | A |
| D | $\infty$ | |
| E | $\infty$ | |
| F | $\infty$ |
接下來檢查與 $B$ 相鄰的點 $C$ 、 $D$ 、 $E$ ,計算如下:
- $B$ 點目前的距離再加上 $\overline{BC}$ ,得到 $1 + (-2) = -1$ ,比目前 $C$ 點距離還要小,因此更新 $C$ 點距離與前一個地點。
- $B$ 點目前的距離再加上 $\overline{BD}$ ,得到 $1 + 6 = 7$ ,比目前 $D$ 點距離還要小,因此更新 $D$ 點距離與前一個地點。
- $B$ 點目前的距離再加上 $\overline{BE}$ ,得到 $1 + 5 = 6$ ,比目前 $E$ 點距離還要小,因此更新 $E$ 點距離與前一個地點。
| 地點 | 距離 | 前一個地點 |
|---|---|---|
| A | 0 | |
| B | 1 | A |
| C | -1 | B |
| D | 7 | B |
| E | 6 | B |
| F | $\infty$ |
接下來更新與 $C$ 相鄰的點 $E$ ,計算如下:
- $C$ 點目前的距離再加上 $\overline{CE}$ ,得到 $-1 + (-8) = -9$ ,比目前 $E$ 點距離還要小,因此更新 $E$ 點距離與前一個地點。
| 地點 | 距離 | 前一個地點 |
|---|---|---|
| A | 0 | |
| B | 1 | A |
| C | -1 | B |
| D | 7 | B |
| E | -9 | C |
| F | $\infty$ |
接下來更新與 $D$ 相鄰的點 $F$ ,計算如下:
- $D$ 點目前的距離再加上 $\overline{DF}$ ,得到 $7 + (-6) = 1$ ,比目前 $F$ 點距離還要小,因此更新 $F$ 點距離與前一個地點。
| 地點 | 距離 | 前一個地點 |
|---|---|---|
| A | 0 | |
| B | 1 | A |
| C | -1 | B |
| D | 7 | B |
| E | -9 | C |
| F | 1 | D |
接下來更新與 $E$ 相鄰的點 $D$ 、 $F$ ,計算如下:
- $E$ 點目前的距離再加上 $\overline{DE}$ ,得到 $-9 + 9 = 0$ ,比目前 $D$ 點距離還要小,因此更新 $D$ 點距離與前一個地點。
- $E$ 點目前的距離再加上 $\overline{EF}$ ,得到 $-9 + 3 = -6$ ,比目前 $F$ 點距離還要小,因此更新 $F$ 點距離與前一個地點。
| 地點 | 距離 | 前一個地點 |
|---|---|---|
| A | 0 | |
| B | 1 | A |
| C | -1 | B |
| D | 0 | E |
| E | -9 | C |
| F | -6 | E |
$F$ 點是終點,無後續其他點。當所有點都都遍歷過,這一輪鬆弛就結束,可以進行下一輪鬆弛。
第二輪鬆弛
接下來進行第二輪鬆弛。從 $A$ 點開始,與 $A$ 相鄰的點有 $B$ 和 $C$ ,且 $A$ 目前的距離為 0 。因為 $\overline{AB} = 1$ ,且 $A$ 目前的距離再加上 $\overline{AB}$ 就得到 $0 + 1 = 1$ , 不小於 $B$ 點現有距離 $-4$ ,因此不更新。同理, $C$ 點也是。
| 地點 | 距離 | 前一個地點 |
|---|---|---|
| A | 0 | |
| B | 1 | A |
| C | -1 | B |
| D | 0 | E |
| E | -9 | C |
| F | -6 | E |
計算出 $A$ 點鄰近的 $B$ 、 $C$ 點不需更新後,現在依序計算其他點,從 $B$ 點開始。 $B$ 點鄰近點為 $C$ 、 $D$ 、 $E$ ,計算如下:
- $B$ 點目前的距離再加上 $\overline{BC}$ ,得到 $1 + (-2) = -1$ 不小於 $C$ 點現有距離 -1 ,因此不更新 $C$ 點。
- $B$ 點目前的距離再加上 $\overline{BD}$ ,得到 $1 + 6 = 7$ 不小於 $D$ 點現有距離 0 ,因此不更新 $D$ 點。
- $B$ 點目前的距離再加上 $\overline{BE}$ ,得到 $1 + 5 = 6$ 不小於 $E$ 點現有距離 -9 ,因此不更新 $E$ 點。
| 地點 | 距離 | 前一個地點 |
|---|---|---|
| A | 0 | |
| B | 1 | A |
| C | -1 | B |
| D | 0 | E |
| E | -9 | C |
| F | -6 | E |
接下來更新 $C$ 點鄰近的點 $E$ 。 $C$ 點目前距離為 $-1$ ,對 $\overline{CE} = -8$ 操作後,得到 $E$ 點距離為 $-1 + (-8) = -9$ ,因此不更新 $E$ 點。
| 地點 | 距離 | 前一個地點 |
|---|---|---|
| A | 0 | |
| B | 1 | A |
| C | -1 | B |
| D | 0 | E |
| E | -9 | C |
| F | -6 | E |
接下來更新 $D$ 點鄰近的點 $F$ 。 $D$ 點目前距離為 $0$ ,對 $\overline{DF} = -6$ 操作後,得到 $F$ 點距離為 $0 + (-6) = -6$ ,因此不更新 $F$ 點。
| 地點 | 距離 | 前一個地點 |
|---|---|---|
| A | 0 | |
| B | 1 | A |
| C | -1 | B |
| D | 0 | E |
| E | -9 | C |
| F | -6 | E |
最後更新 $E$ 點鄰近的點 $D$ 、 $F$ ,計算如下:
- $E$ 點目前的距離再加上 $\overline{DE}$ ,得到 $-9 + 9 = 0$ 不小於 $D$ 點現有距離 0 ,因此不更新 $D$ 點。
- $E$ 點目前的距離再加上 $\overline{EF}$ ,得到 $-9 + 3 = -6$ 不小於 $F$ 點現有距離 -6 ,因此不更新 $F$ 點。
| 地點 | 距離 | 前一個地點 |
|---|---|---|
| A | 0 | |
| B | 1 | A |
| C | -1 | B |
| D | 0 | E |
| E | -9 | C |
| F | -6 | E |
第三輪鬆弛
由於在第二輪中,所有的點距離已經無再變動。因此,第三、四、五倫鬆弛已經沒有計算的必要。
若有張圖在計算完 $|V| - 1$ 輪後, 在第 $|V|$ 輪還能夠繼續鬆弛,代表該圖存在負權迴圈,會出現無限次鬆弛的情形,無法正確求出最短路徑,應該停止計算並調整路徑,或更換演算法。
路徑
經過以上演算,可以得到 $A$ 點到各點路徑為
$A \to B$ $$ A \Rightarrow B, $$
$A \to C$ $$ A \Rightarrow B \Rightarrow C, $$
$A \to D$ $$ A \Rightarrow B \Rightarrow C \Rightarrow E \Rightarrow D, $$
$A \to E$ $$ A \Rightarrow B \Rightarrow C \Rightarrow E, $$
$A \to F$ $$ A \Rightarrow B \Rightarrow C \Rightarrow E \Rightarrow F, $$
演算法
根據以上範例,可以總結貝爾曼-福特演算法步驟如下:
- 初始化所有距離,將所有節點 $u$ 的最短距離 $dist[u]$ 設為 $\infty$,起點距離設為 0 。
- 進行第 $i$ 輪鬆弛。
- 設定愈計算的該條路徑長為 $w$ ,若更新後的最短距離 $dist[u] + w$ 小於原最短距離 $dist[v]$,則更新 $dist[v] = dist[u] + w$ ,並記錄前一個地點 $pre[v] = u$ 。
- 回到第 3 步,直到完成一輪所有邊的鬆弛。
- 回到第 2 步,直到 $i \leq |V| - 1$ 。
- 進行第 $|V|$ 輪鬆弛,若仍有任何邊滿足 $dist[u] + w < dist[v]$ ,則代表圖中存在負權迴圈,此時演算法應終止。
- 輸出最短路徑結果。
結語
貝爾曼-福特演算法是一個簡單且強大的最短路徑演算法,能處理戴克斯特拉演算法無法處理的負權重問題,在邊數不多或需要處理負權邊的問題中非常實用。
參考資料
貝爾曼-福特演算法。(2024年11月14日)。維基百科,自由的百科全書。2025年7月17日參考自 https://zh.wikipedia.org/zh-tw/贝尔曼-福特算法
波波微课。(2025年4月1日)。Bellman-Ford最短路径算法 [影片]。Youtube。2025年7月18日參考自 https://youtu.be/YklWOOAR6rs